新型壓電致動器賦予可攜式觸控螢幕設計更強的觸感回饋能力
資料提供者:DigiKey 北美編輯群
2020-02-13
觸控螢幕使用者介面有比機械介面更明顯的優勢,因此越來越普及。對消費者而言,這種介面外觀俐落且操作直覺,對工業使用者而言,密封的顯示器可避免灰塵及受潮問題。但對這兩種使用者而言,還是有缺點。舉例來說,消費者可能會懷念按下機械式開關的便利性和隨之而來的滿足感,而對工業使用者來說,若操作觸控螢幕時戴著手套,可能很難確認是否按下了按鈕。
觸感回饋會以振動方式來反映按鈕的操作情況,已用於克服觸控螢幕缺乏觸感的問題。但現有的解決方案傾向於使用龐大複雜的機械系統,包括偏軸轉動慣量 (ERM) 振動馬達和線性諧振致動器 (LRA)。壓電觸感回饋則提供更緊湊、更具靈活性的替代方案。但直到最近,壓電觸感回饋仍因工作電壓較高而難以用於低功耗應用,但對電池供電型最終產品來說這卻是關鍵要求之一。
不過,「高解析度」的壓電觸感解決方案已有所進展,不僅解決了功耗的問題,更針對觸感介面設計帶來其他優點,如小巧薄型的外形尺寸、有力的回饋感以及快速的反應時間等。
本文先簡要探討新型壓電觸感致動器與 ERM 和 LRA 相比的優點,然後介紹一款以多層結構和雙極驅動模式為架構的新世代元件,如何搭配高效率的專用驅動器解決先前的功耗問題。接著,本文以 TDK 的觸感產品以及 Boréas Technologies 和 Texas Instruments (TI) 的驅動器為例,說明工程師如何在下一個觸控螢幕觸感回饋產品中利用這些致動器和驅動器。
觸感回饋選項
若想在觸控螢幕介面中加入觸感回饋,設計人員有三種選擇,包括 ERM、LRA 及壓電致動器。三者採用相同的基本原理,都是由微控制器監控運作,並由驅動器控制致動器產生振動 (圖 1)。不同之處在於振動產生的方式,ERM 使用離心旋轉砝碼,LRA 使用螺旋彈簧懸掛磁性砝碼,壓電元件則倚賴 (反向) 壓電效應,在電場作用下引起晶體或陶瓷物體發生維度變化。
 圖 1:觸感觸控螢幕系統由微控制器、驅動器及致動器組成。在此範例中,致動器採用壓電元件,但 ERM 和 LRA 也是常見的替代方案。(圖片來源:Boréas Technologies)
圖 1:觸感觸控螢幕系統由微控制器、驅動器及致動器組成。在此範例中,致動器採用壓電元件,但 ERM 和 LRA 也是常見的替代方案。(圖片來源:Boréas Technologies)
在可攜式設計中,ERM 和 LRA 很受歡迎,主要是因為提供低電壓 (大約 3 V) 選項,而且只需要簡單的驅動器設計即可。相比之下,傳統的壓電元件需要高出許多的電壓 (高達 200 V),才能產生足夠的機械變形,為消費者提供良好的體驗。之所以需要較高的電壓,是因為傳統的壓電觸感驅動器技術一般都是採用比例縮小的音訊放大器技術,而非從頭開始設計時就將低功率納入考量。另外一項設計挑戰在於,缺少專用的低功率觸感致動器驅動器,導致設計人員只能改用效率較低的解決方案。
不過,壓電方案的主要優勢在於支援高解析度的觸感,能增強回饋感,而非只是單純的單調振動而已。例如,壓電致動器能產生不同頻率和振幅的振動,可用來表示單一顆按鈕的不同按壓結果 (圖 2)。
") 圖 2:壓電觸感致動器可促成多種振動,可用於指示單一顆按鈕啟動後的不同結果。(圖片來源:Boréas Technologies)
圖 2:壓電觸感致動器可促成多種振動,可用於指示單一顆按鈕啟動後的不同結果。(圖片來源:Boréas Technologies)
總之,高解析度觸感回饋解決方案需要:
- 大頻寬:以促成多種振動頻率和模式
- 高加速度 [g]:以增強回饋力道
- 大位移:提高觸感回饋靈敏度
- 低延遲:藉由快速反應時間擴大回饋範圍
表 1 概述每種觸感回饋解決方案的效能,並表明壓電方案因能兼顧頻寬、回饋力道、靈敏度及延遲性,因此是高解析度應用的唯一選擇。
|
表 1:觸感回饋解決方案的工作特性比較。壓電元件提供良好的加速度 (測量單位為 g,1 g 為地球表面重力加速度 (9.81 m/s2))、位移與回應時間,以及自訂波形,能滿足高解析度觸感回饋的需求。(圖片來源:DigiKey,由作者提供)
請注意,壓電致動器的驅動器更為複雜,部分原因是需要額外的功能來產生自訂波形,為觸感回饋提供定義和背景。ERM 和 LRA 不支援自訂波形,因此驅動器較為簡單。
新型壓電觸感回饋元件的優點
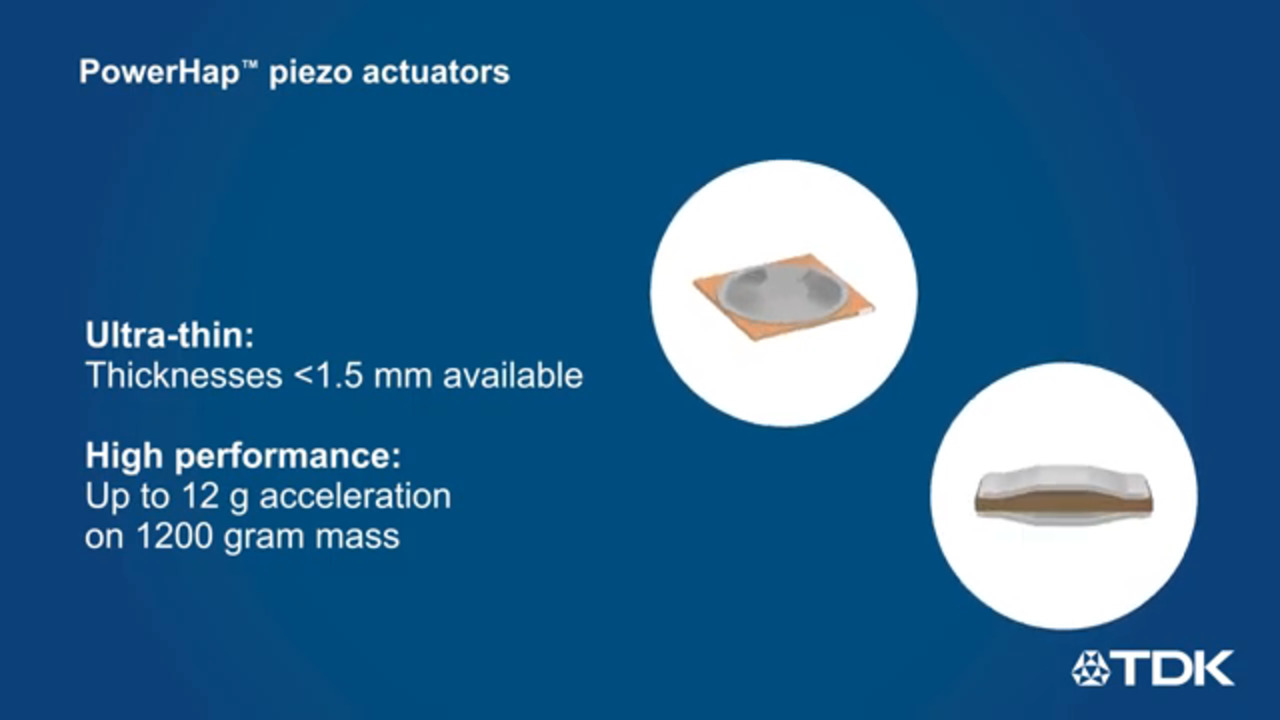
近來針對壓電致動器和高效專用驅動器推出的產品,讓此技術成為更適合電池供電型產品的解決方案。最近推出的壓電觸感產品,如 TDK 的 PowerHap B54102H1020A001 (面積 12.7 mm2) 和 B54101H1020A001 (26 mm2),高度均低於 2.5 mm,而且都採用多層結構,而非以音訊放大器技術為基礎之元件所採用的單層結構。這種多層結構會降低驅動電壓 (降至 60 V 和 120 V 之間),因此在某種程度上可減少對驅動器的要求。
由於具有反向壓電效應,TDK 多層產品的各個層僅會在 z 軸方向小幅度擴張。但是,由於壓電元件必須維持固定容積,因此各層會同時沿 x 和 y 兩個維度收縮。
TDK 產品以機械方式放大此收縮度,做法是在壓電元件兩端使用一對銅鈸,讓 z 軸移動量增加 15 倍,使位移量達到 35 µm 至 65 µm,視型號而定 (圖 3)。在 100 g 負載下 (單極工作,單脈衝正弦波,200 Hz),較大的 TDK 致動器只需 1 ms,即可達到 30 g 峰對峰加速度。頻率範圍為 1 到 1000 Hz,可讓設計人員客製化開發高解析度的觸感回饋設定檔。
 圖 3:TDK 壓電觸感致動器採用多層結構和銅鈸來放大 z 軸的移動量。(圖片來源:TDK)
圖 3:TDK 壓電觸感致動器採用多層結構和銅鈸來放大 z 軸的移動量。(圖片來源:TDK)
TDK 的壓電觸感致動器能以單極模式或雙極模式工作。單極模式會在整個致動器上施加正電壓,而雙極模式則會讓電壓在正負峰值之間改變。雙極模式的優點在於,能在相同的峰對峰電壓下達到更大的位移量,或以較低的峰對峰電壓達到相同的位移量。雙極模式的缺點在於,會增加致動器上的機械負載和電氣負載 (圖 4)。
 offers the same mechanical displacement as unipolar") 圖 4:雙極模式 (右) 提供和單極模式相同的機械位移量,但使用較低的峰對峰電壓。(圖片來源:TDK)
圖 4:雙極模式 (右) 提供和單極模式相同的機械位移量,但使用較低的峰對峰電壓。(圖片來源:TDK)
矽晶廠商最近還推出專為觸感回饋應用設計的驅動器晶片。這些增強的設計能在良好的頻率範圍內產生多種振動模式,並提供單極或雙極驅動特性,而且工作效率遠高於先前設計。相關範例包括 Boréas Technologies 的 BOS1901CQT 壓電觸感驅動器和 Texas Instruments 的 DRV2667 馬達電源驅動器。
Boréas Technologies 的 IC 是一款採用能量回收技術的單晶片壓電致動器驅動器,能產生多個振動訊號。此晶片能以 3 V 至 5.5 V 的電源驅動高達 190 Vpk-pk 的致動器。BOS1901 使用高速序列周邊裝置介面 (SPI),且所有設定值都可透過數位前端進行調整。啟動時間通常不到 300 μs,可達到低延遲。
TI 晶片是一款整合 105 V 增壓開關及數位前端的壓電觸感驅動器,能夠驅動高電壓和低電壓致動器。有了數位前端,微處理器不必再負責產生脈寬調變 (PWM),主機系統中也無需額外的類比通道。此晶片包含用於儲存和回叫波形的專用記憶體,以及進階波形合成器。啟動時間通常為 2 ms,因為會限制延遲情況;而熱過載保護則可在過度驅動時避免元件受損。
壓電觸感系統設計
Boréas 晶片和 TI 晶片都可在已內建應用處理器的觸控式系統中工作。處理器會經由 SPI 觸發觸感回饋的執行。另外,設計人員也可使用類比輸入來觸發觸感效果 (圖 5)。
 圖 5:TI DRV2667 馬達電源驅動器的應用電路。觸控螢幕應用處理器會觸發觸感事件,接著 TI 晶片會驅動壓電觸感元件。(圖片來源:Texas Instruments)
圖 5:TI DRV2667 馬達電源驅動器的應用電路。觸控螢幕應用處理器會觸發觸感事件,接著 TI 晶片會驅動壓電觸感元件。(圖片來源:Texas Instruments)
最新驅動器有一定程度的整合度,因此設計具有壓電觸感回饋的觸控螢幕系統已更為容易,但某些元件的挑選對設計效能的最佳化更具重要性。例如,增壓電壓 (BST) 應比壓電致動器要承受的峰值電壓大 5 V。這讓放大器有一定的裕度,且可使用圖 5 所示的電阻分壓器網路 R1/R2 來設定。
電阻值計算公式為:V(BST) = V(FB) x (1 + R1/R2),其中 V(FB) = 1.32 V。
因此,假如想讓 TI 驅動器的最大 V(BST) 能力達到 105 V,R1 和 R2 的值分別可為 768 kΩ 和 9.76 kΩ。
峰值升壓電流會透過電感 L1 由電源提供。此電流由 R(EXT) 決定,但必須謹慎挑選能處理所編程之電流限值 (ILIM) 的電感。R(EXT) 與 ILIM 之間的關係由以下方程式確定:
![]()
其中,K = 10,500,VREF = 1.35 V,RINT (驅動器內部電阻) = 60 Ω,ILIM = L1 的峰值電流限值。
為確保最佳驅動器效能,電感的挑選很重要。以 TI 晶片為例,建議的電感範圍為 3.3 至 22 μH。為減少升壓轉換器的切換損耗,可選擇較大的電感值;為獲得最大的輸出電流,可選擇較小的電感值,究竟該如何選擇則需要進行權衡。
從驅動器角度來看,壓電觸感致動器的關鍵電氣規格是電壓額定值和電容值。舉例來說,在 TI 驅動器的最高頻率 500 Hz 下,元件已進行最佳化,能在 200 Vpk-to-pk (驅動器的最高電壓擺盪能力) 下驅動最多 50 nF。如果降低編程升壓電壓和/或使用者將輸入頻率範圍限制在比如 300 Hz,此晶片就能驅動更大的電容量。
另外,升壓電容 (C(BST)) 的選擇也很重要。此電容的電壓額定值,必須至少等同 (最好超過) 升壓電壓。例如,在 TI 晶片的最高升壓電壓 105 V 下運行時,建議使用額定值為 250 V 的 X5R 或 X7R 型 100 nF 電容。C(BST) 的最小工作電容必須至少為 50 nF。如果 V(BST) 為 30 V 至 80 V,可使用額定值為 100 V 的 100 nF 電容;如果 V(BST) 低於 30 V,則建議使用額定值為 50 V 的 0.22 μF 電容。
基於開關引腳電流需求,建議在電感旁使用大容量電容 (CBULK)。建議使用電容量至少為 1 μF 的 X5R 或 X7R 型陶瓷電容。
開發工具
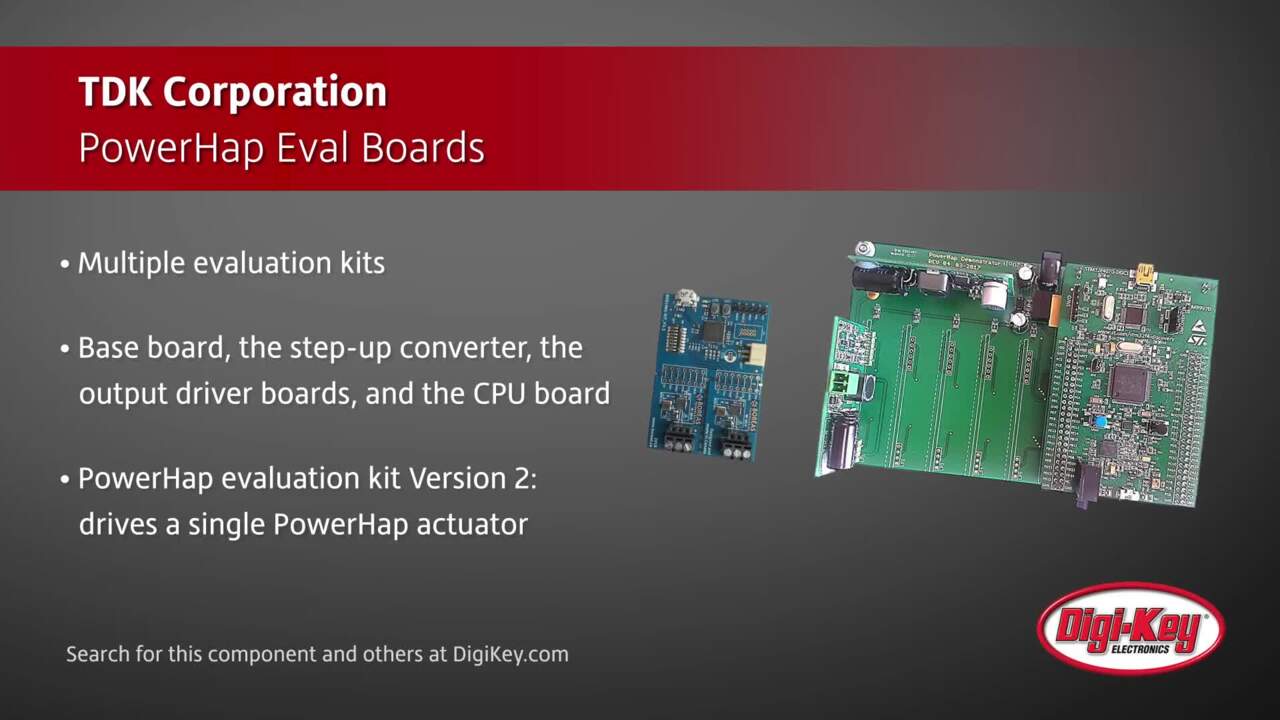
若工程師想在投入硬體前試用 TDK 的壓電觸感致動器能力,不妨使用該公司的單通道 Z63000Z2910Z 1Z 1 PowerHap 評估套件。此套件內含一個基板、一個降壓轉換器、一個輸出驅動器板和一個微控制器板。
此套件隨附配置軟體,可在 Windows 7 (或更新版本) 的個人電腦上執行。載入此軟體後,即可使用 USB 纜線,將套件連接至個人電腦,並以 12 V (DC) 供電。軟體隨即會提供一個介面,可用來配置致動器按下後的觸感回應。此介面可用來配置以下訊號參數 (圖 6):
- 振幅 - 5 % 至 100% (115 V)
- 頻率 - 20 Hz 至 300 Hz
- 波形 (梯形波、正弦方波、鋸齒波)
- 梯形波工作週期 - 35% 至 75%
- 脈衝數 - 1 至 1000
- 觸發位準 - 0 至 12 V (觸發位準越低,按下致動器啟動訊號所需的力度就越大)
- 延遲時間 (致動器在此期間偵測不到壓力)
 圖 6:TDK 的 PowerHap 評估套件軟體提供一個訊號配置介面。設定完成後,可透過「Transmit configuration」(傳輸配置) 按鈕,將配置傳送至評估板處理器。(圖片來源:TDK)
圖 6:TDK 的 PowerHap 評估套件軟體提供一個訊號配置介面。設定完成後,可透過「Transmit configuration」(傳輸配置) 按鈕,將配置傳送至評估板處理器。(圖片來源:TDK)
另外,此軟體也能讓工程師建立自訂波形。軟體配置完成後,資訊即會透過 USB 纜線,傳送至套件的處理器。
第二個評估套件是 PowerHap Z63000Z2910Z1Z44,專門為使用 Boréas BOS1901CQT 壓電觸感驅動器的工程師而設計。此套件內含一個基板、一個升壓轉換器、兩個驅動器和一個微控制器。此基本套件隨附一個 TDK 壓電觸感致動器 (圖 7)。
 圖 7:TDK 的 Z63000Z2910Z1Z44 PowerHap 評估套件採用 Boréas 的壓電觸感驅動器,並且符合 USB 音訊協定,因此能簡化配置。(圖片來源:TDK)
圖 7:TDK 的 Z63000Z2910Z1Z44 PowerHap 評估套件採用 Boréas 的壓電觸感驅動器,並且符合 USB 音訊協定,因此能簡化配置。(圖片來源:TDK)
此板件可用 USB 纜線連接至個人電腦,並使用標準 USB 音訊協定,可在電腦上顯示成一般音訊輸出。波形的原型開發 (高達 190 Vpk-to-pk) 以及播放,可使用 USB 音訊協定進行,能在 MATLAB、Python 及 Audacity 等軟體中開發觸感效果的原型。
結論
採用壓電、ERM 及 LRA 致動器的觸感回饋,可在消費性和工業應用中增強觸控螢幕的控制能力。不過,低電壓小型壓電觸感致動器的進步,已將高解析度觸感回饋的優點延伸到電池供電型裝置。
同時,可介接主流應用處理器且支援多種波形的專用驅動器推出後,設計壓電觸感系統也變得更加容易。TDK 等供應商已針對這些元件提供現成的評估套件,因此可在投入硬體設計前進行試驗和原型開發。
聲明:各作者及/或論壇參與者於本網站所發表之意見、理念和觀點,概不反映 DigiKey 的意見、理念和觀點,亦非 DigiKey 的正式原則。