

 Testco
Testco
Testco supplies a comprehensive range of products - relays, solenoids, sensors, LEDs, resistors, circuit protection, switches, and power components - serving customers across the semiconductor, test & measurement, medical, industrial, automation, consumer applications, defense, and more.
 Low-Cost, Power Efficient EMG Prosthetic Hand (Part 2)
Low-Cost, Power Efficient EMG Prosthetic Hand (Part 2)
Creating a low-cost prosthetic arm is challenging, but making one that is also easy to calibrate and accurate is even tougher.
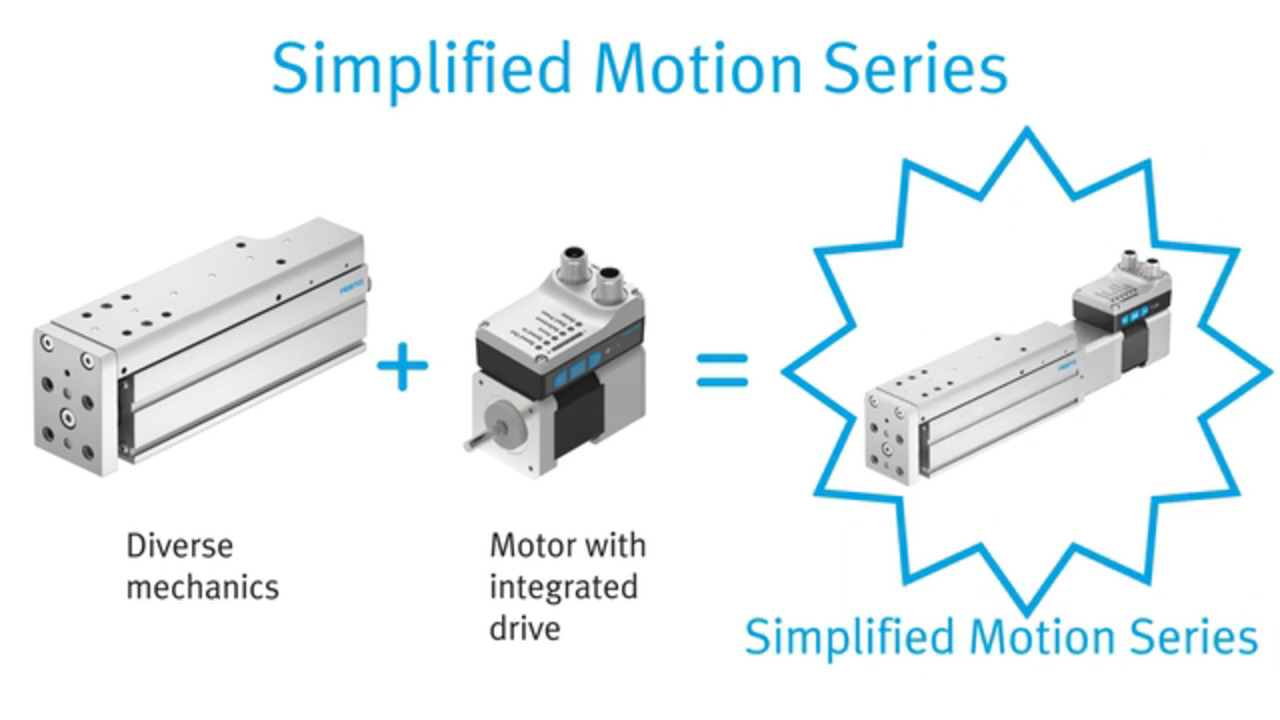
Discover Festo’s Simplified Motion Series (SMS), an easy to use electric actuator solution that bridges pneumatic simplicity with electric automation for positioning, pressing, and handling applications.
 DigiKey 在 2026 年第一季擴充庫存品項,新增近 31,000 款零件及 97 家供應商
發佈日期:2026-04-28
DigiKey 在 2026 年第一季擴充庫存品項,新增近 31,000 款零件及 97 家供應商
發佈日期:2026-04-28
DigiKey 在 2026 年第一季新增約 31,000 款可快速出貨的庫存產品。
 Driving cost efficiency for OEMs and panel builders with the ATV320
Driving cost efficiency for OEMs and panel builders with the ATV320
This webinar will introduce how the Schneider Electric Altivar™ ATV320 variable frequency drive (VFD) helps meet those challenges through a combination of flexible installation options, broad motor compatibility, and powerful embedded features.
 Controlling an XRP Robot with Home Assistant via ESPHome
更新日期: 2026-03-26
Controlling an XRP Robot with Home Assistant via ESPHome
更新日期: 2026-03-26
Build a low-latency XRP robot control system using ESPHome and a UART WiFi bridge. Stream sensors, control motion, and integrate with Home Assistant.

 Building a Dynamometer for the Openwheel Project - Part 1
Building a Dynamometer for the Openwheel Project - Part 1
Explore a custom-built dyno for hub motors using load cells and Arduino, enabling accurate power and torque measurements.
 網路研討會 – 利用 ATV320 讓 OEM 廠商與面板製造商增進成本效益
網路研討會 – 利用 ATV320 讓 OEM 廠商與面板製造商增進成本效益
本次網路研討會將介紹 Schneider Electric 的 Altivar™ ATV320 變頻器如何協助克服馬達控制的挑戰。
This unboxing video gets you started on building motor-control based applications using PSOC™ Control C3 (KIT_PSC3M5_2GO). The kit is supported by application notes, code examples, training materials and ModusToolbox™.
 適用於電源、馬達控制及隔離技術的車用半導體解決方案
發佈日期:2026-04-01
適用於電源、馬達控制及隔離技術的車用半導體解決方案
發佈日期:2026-04-01
探索 Toshiba 的汽車級半導體解決方案,包括 MOSFET、二極體、隔離元件、馬達驅動 IC。專為可靠性設計,並符合 AEC-Q100 標準,適用於 EV、BMS 及電源應用。

This video explores how Autonomous Guided Vehicles (AGVs) and Autonomous Mobile Robots (AMRs) are revolutionizing modern manufacturing and logistics by automating material flow.

 MAG1020BEL40 線性磁性觸覺回饋器
發佈日期:2026-03-19
MAG1020BEL40 線性磁性觸覺回饋器
發佈日期:2026-03-19
來自 INEED Motors 的 MAG1020BEL40 線性磁性觸覺回饋器為新一代互動式裝置提供超靈敏、高傳真度的觸覺回饋感。

 Accelerating the evolution of smart robotics and autonomous machines
Accelerating the evolution of smart robotics and autonomous machines
From collaborative robots on factory floors to autonomous mobile robots in dynamic environments, learn how ADI’s innovative technologies deliver real-time perception, localization, motion control, and secure connectivity—enabling smarter, safer, and more adaptable machines.

Our customers are constantly upgrading their automation systems. Adding digital control is a common step, and this product is the result of many requests for a digital speed setting control with the option of NOT requiring and encoder.

We are honored to be inducted into the Indiana Manufacturers Association Hall of Fame!! A little about Dart!

The advanced features and options available for the ASP digital closed loop speed pot.
The MicroDrive Series from Dart Controls is the only integrated digital DC speed control on the market. This single device takes the place of many discrete components, saving cost, time and space.

